
{kind=link}
If you’ve followed robots with any frequency, you’ve no doubt encountered the wheel versus leg debate. Why, for instance, should a warehouse opt for a legged Digit robot instead of a rolling Locus system? The explosive popularity of drones has led to similar debates with flying. Recent interest in inventory automation has prompted similar debates between UAVs and rolling systems when it comes to dealing with tall shelves.
Robots tend to be built with a single purpose in mind. That means they do one thing exceptionally well (hopefully), but teaching an existing robot new tricks is tough. Software and AI can only go so far when a piece of hardware has built-in limitations. Meanwhile, building general- or even multi-purpose systems is a lot easier said than done.
Image Credits: Nature Communications
So roboticists are doing what roboticists commonly do: looking to nature for inspiration. After all, animals and humans are often very good at adapting when the situation calls for it. A paper published in Nature at the end of June details the Multi-Modal Mobility Morphobot robotic system. Given that the name is a bit of a tongue twister that sounds like a late-80s Teenage Mutant Ninja Turtle knockoff, we’ll be following their lead and referring to it as M4 henceforth.
The paper details a range of different biological inspirations. There’s a sea lion, which uses flippers to swim and walk; a meerkat, which stands on its hind legs to check for danger; and the chukar bird (new one to me — it’s a partridge that primarily lives in Asia and Europe), which relies on its wings for assistance and balance when walking up an incline.
At the heart of M4 is an articulated body made of carbon fiber and 3D-printed parts that allows its shape to adapt as required. This includes four quadcopter-style rotors that also function as wheels.
“To substantiate the claimed locomotion plasticity in M4, we performed several experiments, including, wheeled locomotion, flight, MIP, crouching, object manipulation, quadrupedal-legged locomotion, thruster-assisted MIP over steep slopes, and tumbling over large obstacles,” the paper’s authors write. “In addition, to show M4’s design is scalable and can achieve payload capacities that support self-contained operations, we tested fully autonomous multi-modal path-planning using onboard sensors and computers in M4.”
The team set up obstacle courses that require M4 to adapt on the go. Specific forms are based entirely on terrain, but other factors are at play. For example, flying is the most straightforward way to get up an incline, but it requires a lot more power than rolling. In that instance, the system uses both modes: wheeling up the ramp on two wheels, while two rotors assist the move (see: chukar bird).
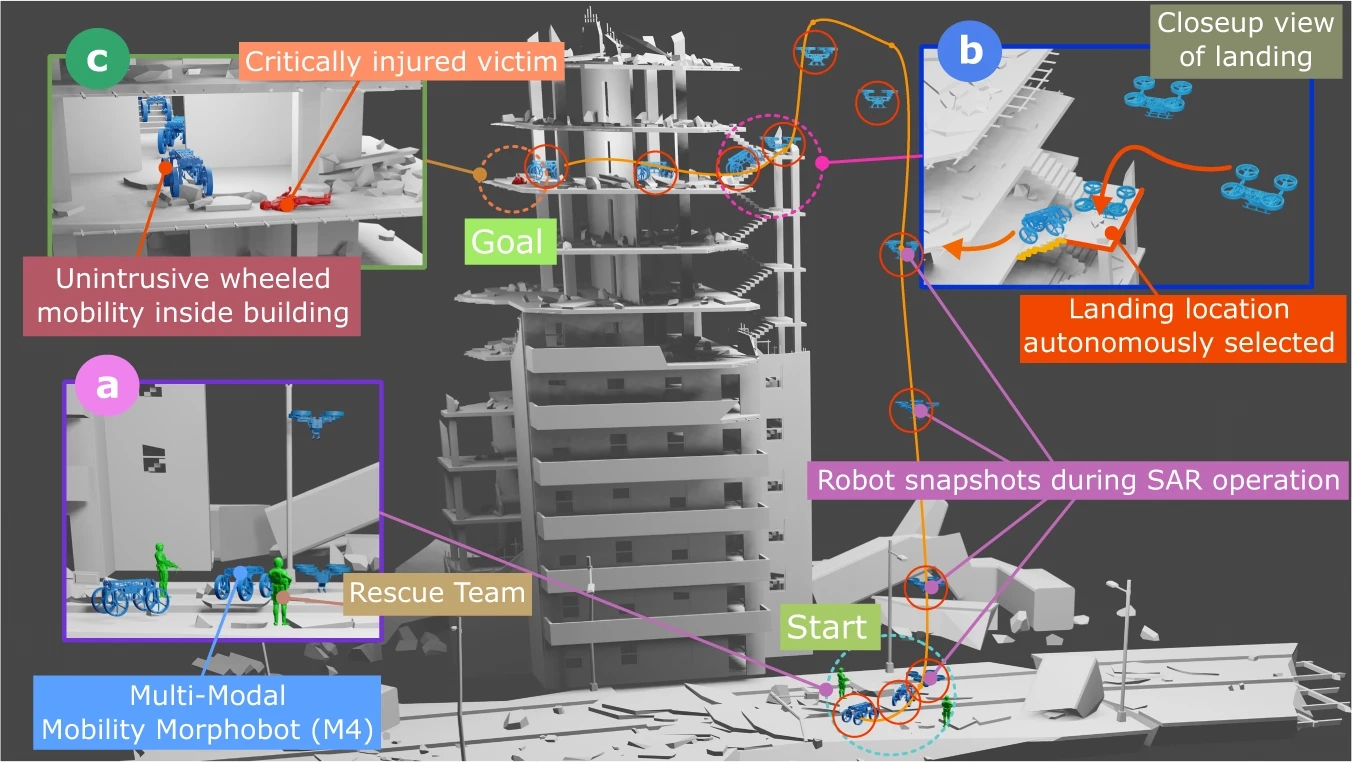
Image Credits: Nature Communications
It’s a clever design, though it’s probably overkill in a lot of situations. There are a lot of tasks that can be executed just fine with only wheels, rotors or legs to rely on. The team points to search and rescue missions after natural disasters like earthquakes and floods as a potential application.
“In the aftermath of unique incidents such as flooding, one event may accompany another that destroys the landscape differently,” according to the paper. “A hurricane may produce flooding and wind damage to roads and buildings. Or, a landslide may cause the movement of a large rock mass down a slope, dam a river, and create a flood. In these scenarios, M4 can leverage its versatility to achieve mobility that fits diverse mission requirements in search and rescue.”